
Drone team in actie
Verslag van het drone team Koos, Walter, Joop, Henk, Raymond, Bernard, Abe, Hugo, John, Jan, Rob en Ton
Als drone vlieger heb je de verantwoordelijkheid voor het veilig uitvoeren van de vlucht en je zou het niet denken, maar daar komt best veel bij kijken.
De vluchtopdracht bestaat uit een stukje tekst met naam en adres van de boer en informatie over het perceel. Ook zit er een afbeelding bij van waar er exact gevlogen moet worden. Het klinkt saai, maar dat is het allerminst….
De vluchtinformatie die we krijgen aangeleverd vanuit Weidehof vergelijk ik altijd met Google Earth om te zien hoe ik er kan komen en of er obstakels in de buurt zijn, als hoogspanningsmasten, hoge bomen en windmolens – geen vriendjes van de drone. Onze drone is namelijk niet bemand met slimme software, waarmee hij de obstakels kan ontwijken. Onze drone denkt: ,,ik kan er wel doorheen.’’ En ik verzeker jullie: de drone verliest het in alle gevallen.
No-Go
En dan hebben we nog een belangrijke factor, het weer. Wat is de voorspelling voor de volgende ochtend, wat doet de wind? Kan het gaan regenen of - net zo belangrijk is, krijgen we mist? Mist dempt het bereik van de zender, zorgt dat alles nat wordt en bij lage temperaturen zorgt mist ook voor ijsvorming op de drone.Regen, wind en mist kunnen voor een No-Go zorgen en aangezien we altijd met een team van 2 man vliegen is er soms om 04:30 al druk overleg of het wel of niet kan. Gelukkig hebben we een checklist met daarin alle limieten van de drone met betrekking tot de wind en zelfs zonnewind, niet te vergeten. We hebben de beschikking over een app, die 3 uur vooruit kijkt naar de weersomstandigheden en kunnen daardoor zo’n No-Go beslissing gefundeerd nemen.
De drone staat in een flinke kist die de apparatuur beschermt tegen het transport. De batterijen zitten in een koelbox, niet om ze te koelen maar juist om ze met een kruik te verwarmen. Als het in de ochtend tussen de 0 en 5 graden is en we de batterijen niet zouden voorverwarmen, scheelt dat 20% van de vliegtijd. En ja, de batterijen hebben het beter dan wij - zo lekker knus tegen elkaar, rond de 20 graden als ze de drone in gaan en rond de 25 als ze er weer uitkomen.
De avond voor de vlucht wordt alles gecontroleerd: Zijn de batterijen, zender en het grondstation opgeladen. Het grondstation is essentieel voor de vlucht. Het ontvangt informatie van de drone over de locatie. We kunnen dan op het grondstation de omgeving van de drone zien en goed checken of we op de juiste plek staan.


Waypoints
En nu komt het mooie: Op het grondstation kunnen we met de muis zogenoemde waypoints plaatsen, waartussen een lijn wordt getrokken. Zo zien we op het scherm hoever we vliegen en hoever de waypoints verwijderd zijn. De drone kan zonder correctie van waypoint naar waypoint vliegen.
Als we het eens zijn over de vluchtroute, laden we de hoogte en snelheid in. Nog een laatste check of de omgeving veilig is en de motor wordt gestart. De drone begint aan de vlucht.
Ho…. even op 3 meter hoogte blijven hangen vertelt de checklist ons, controleer of alles werkt. Reageert de drone goed in alle richtingen? Kunnen we een foto maken? Zo ja, dan stijgen we door en vliegen we richting het eerste waypoint. Het scannen van het weidevogelgebied is begonnen.
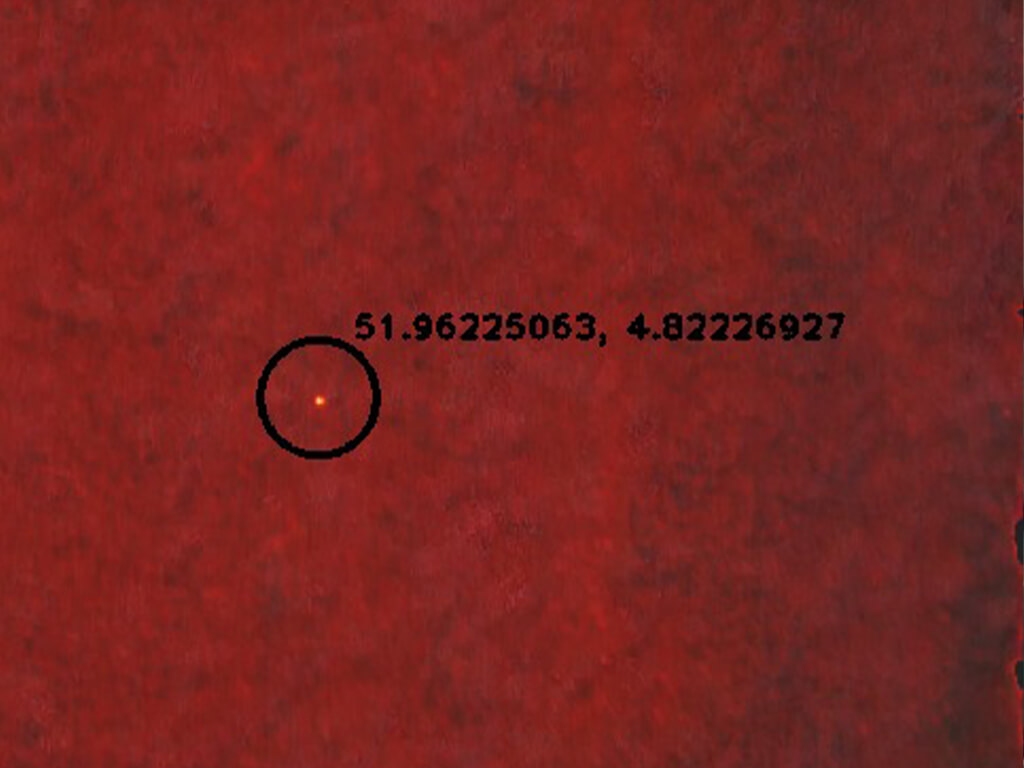
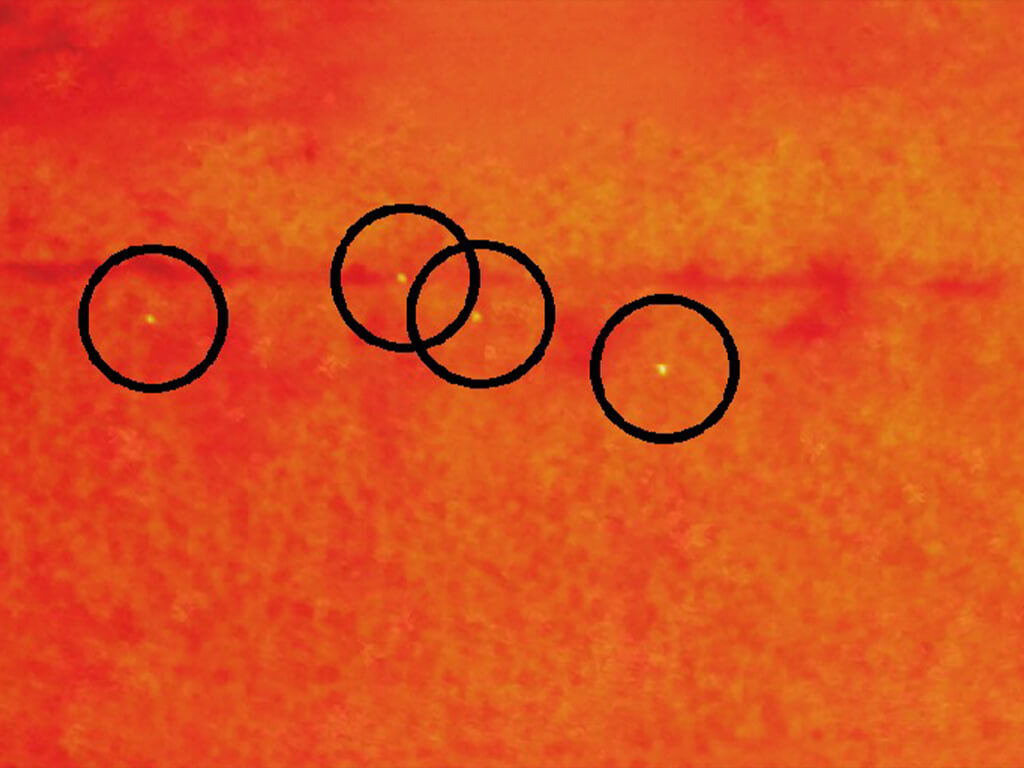
Vliegend op 30 meter hoogte met een snelheid tussen de 8 en 10 km per uur, kijkend op een schermpje van 10 bij 15 cm (of kleiner), via een thermocamera zien we niet zo veel. Of ja eigenlijk zien we wel veel, maar wat we zien is (nog) niet duidelijk. Een klein rood puntje met een zwarte cirkel vliegt van boven naar beneden door het beeld. En dan sta ja daar om 5.15 uur in de kou. Is het een nest of wat? Snel stoppen we drone - even een beetje terug - Ja dat is het! Foto maken en weer door.
En zo maken we tijdens de vlucht soms wel een kleine honderd foto’s van iets dat we zien of dat interessant zou kunnen zijn. Ook die haas, die maar achter de drone aan bleef lopen of de scholekster die net voor (of beter onder) de camera dook om te onderzoeken wat voor een gek ding nu weer zijn territorium was binnen gedrongen.

Met een beetje geluk vliegen we op een ochtend 4 batterijen leeg en hebben dan 0,48km2 gescand en dat is toch 48.0000m2 en dat in net iets meer dan een uur vliegen.
Vluchtverslag
Na de laatste vlucht koppelen we de drone met een internetdraadje aan het grondstation. Alle foto’s worden zo naar een server gestuurd.Als we de drone hebben gecheckt op eventuele schade schrijven we een vluchtverslag met alle ins en outs. De drone gaat alvast naar de piloot die de volgende dag op pad moet.
Elke foto bevat coördinaten van de plek waar die is gemaakt en ook het temperatuur verschil met de grond is zichtbaar en geeft veel informatie. Iedere foto wordt bekeken - een hele klus, wetende dat er naast thermische foto’s tegelijkertijd ook een foto met daglicht is gemaakt. Gelukkig wordt de beoordeling gedaan door iemand met veel ervaring 😊 en die heeft hij nodig ook, om snel te kunnen zien of het een nest, een hazenkeutel of kuikens zijn.
Thuis aan de koffie, komt er meestal een appje met een afbeelding van het gevlogen gebied. De stipjes die wij hebben vastgelegd zijn nu door icoontjes overschreven: hier een grutto, daar een eend, wat kuikens, een haas en ook een enkel vraagteken.
Dit alles met maar één doel: informatie verzamelen en delen zodat we meer kennis hebben over de weidevogelstand in de Krimpenerwaard.
